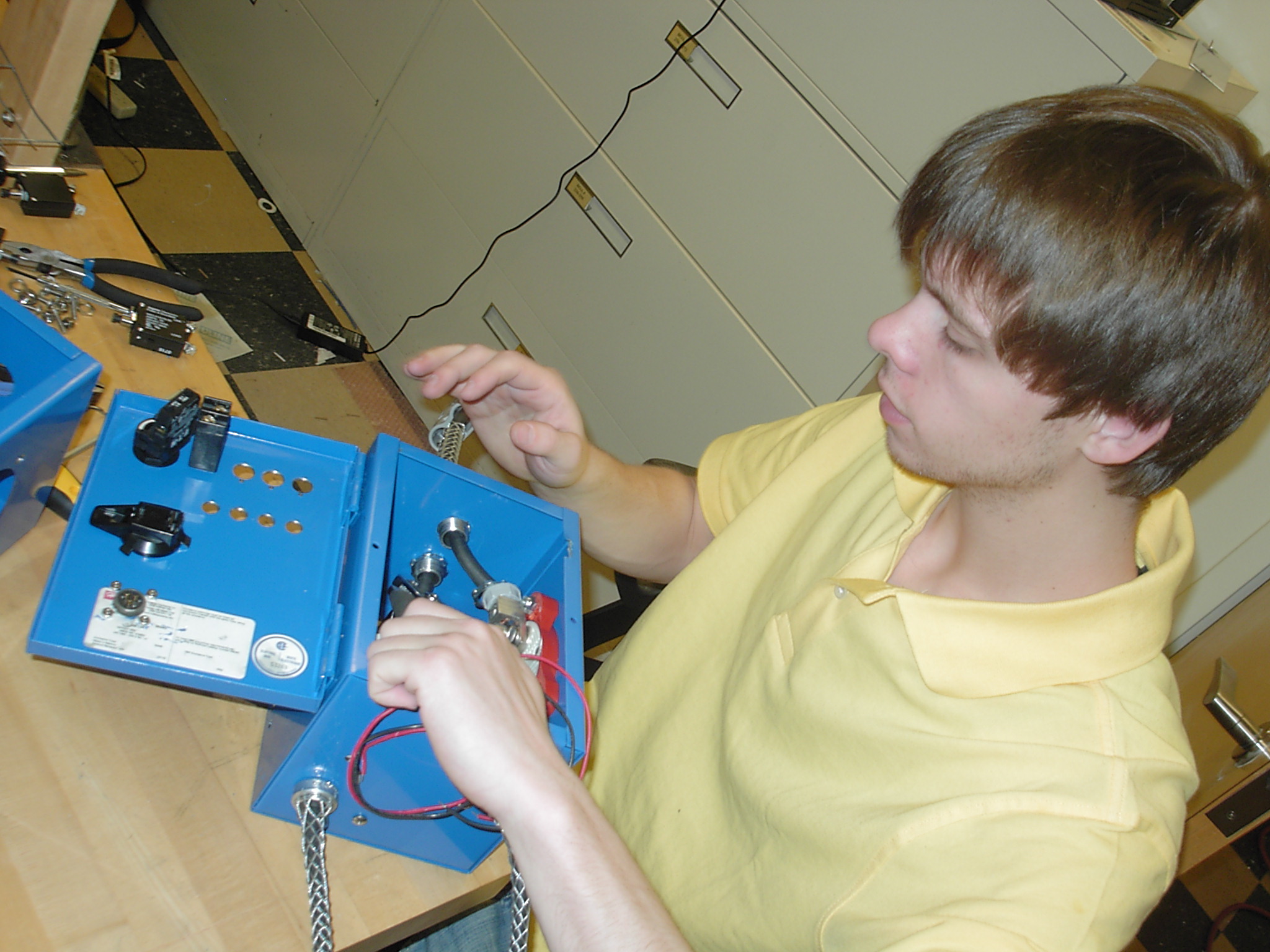
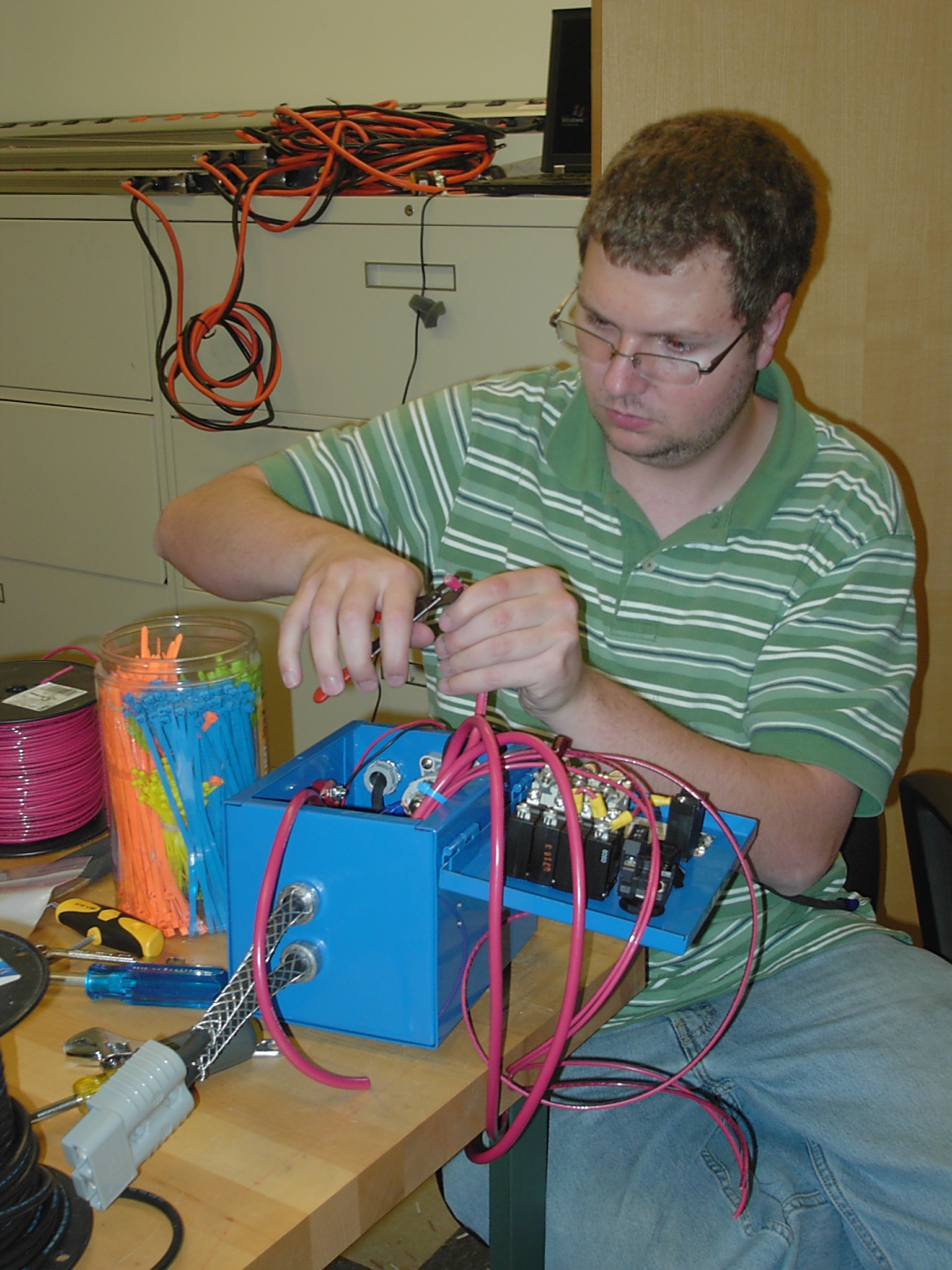
Last night we wired the main electrical distribution box for use with wall power. Will used the schematic that Phil and Will came up with. The box is very full, but we do not appear to have any mistakes in it.
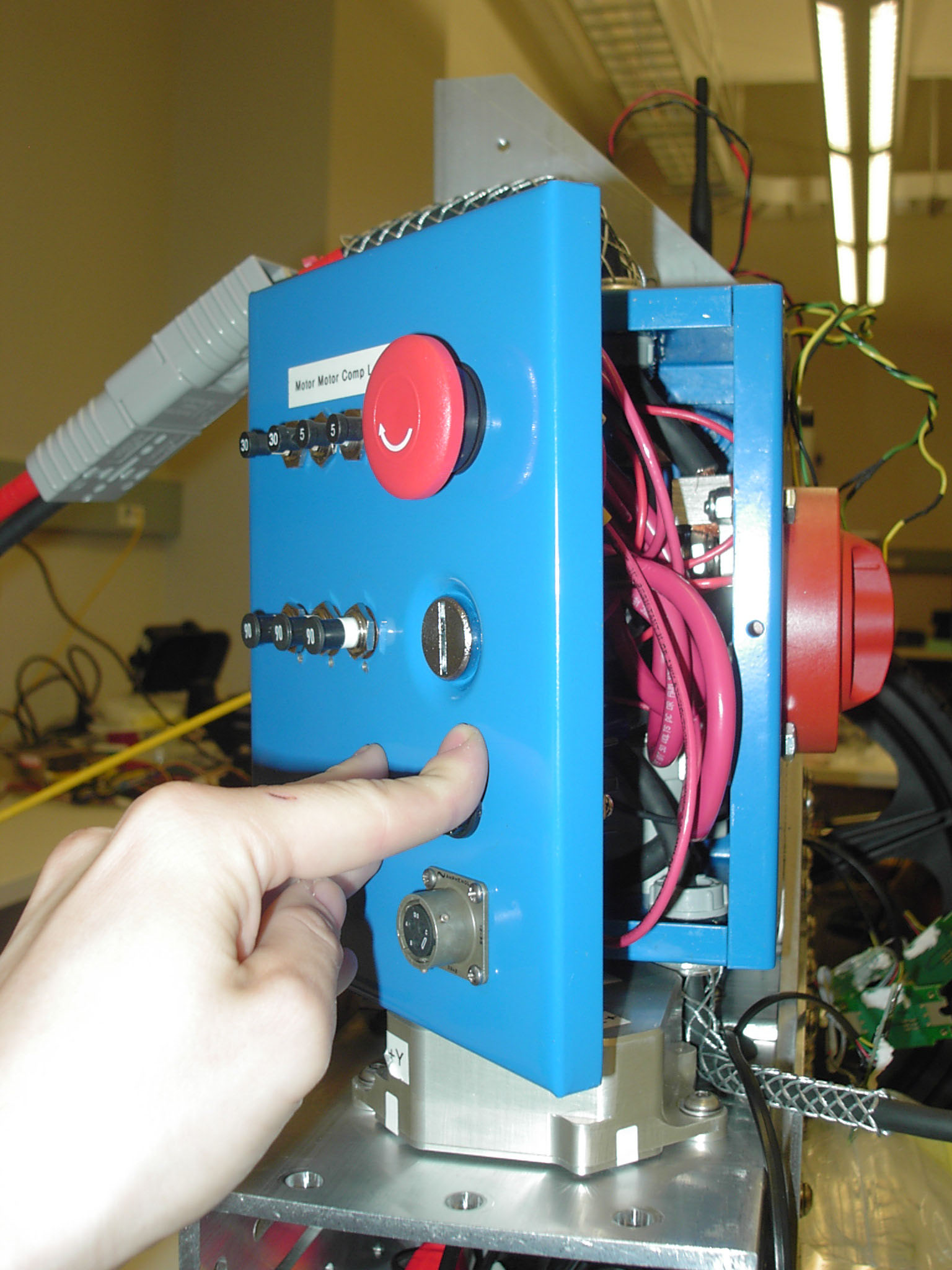
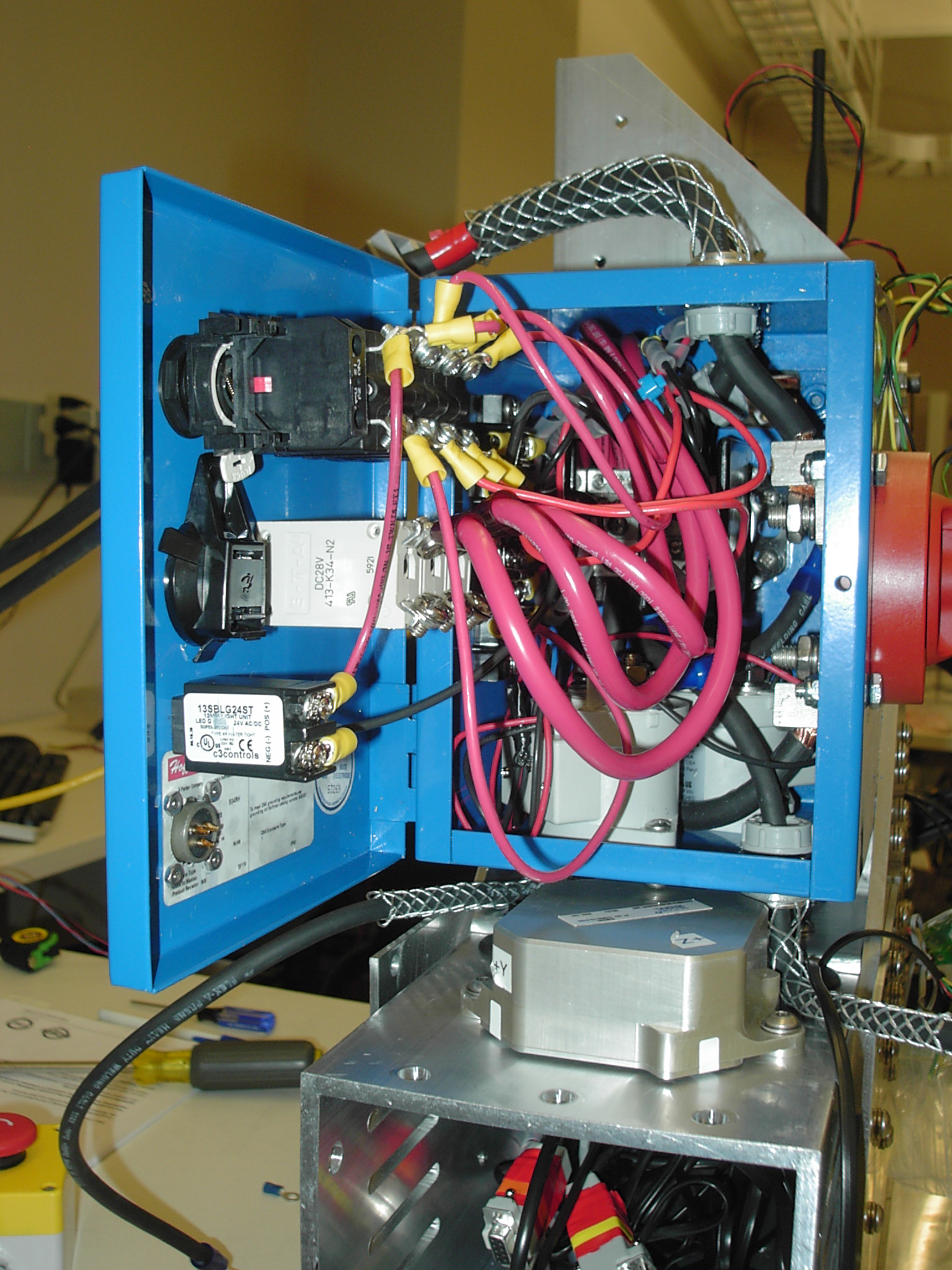
Last night we attempted to do an electrical soundness test for the system. What we did was to first check with all of the fuses and the box open that there was no short between the high and low buses. We then checked to make sure that as we pushed in the fuses we did not see a short. This does not meant that there was no connection. But all of the resistances were in line with what you would expect to see with the component hooked up. We closed the box and checked for a short again using the wall terminals. We then pushed in all of th breakers to see if we saw the expected resistance. We did and decided to move to the next step of testing. We pulled out all of the fuses and connect it to wall power. After releasing the e-stop the power light turned on. We waited and nothing seemed to spark or do anything upsetting. We then powered off the robot and turned on the logic circuit. We checked to see if we could see status lights on the MC and we could. We then power-cycled again and this time turned on the computer. We were able to log-in via remote terminal and get messages from the IMU. After this we pushed in the mc power and attempted to get the wheels turning. When we ran some to the test in amc-drive only one wheel responded. We decided to call it a night and to work on it later. We took off the wheel and discovered that the hall line had come undone and that this was the most likely cause of failure.