|
|
|
|

|
Current Projects
 |
Golem Krang
Development of a Wheeled Humanoid Robot to study whole-body planning
and control.
more »
|
 |
Golem Hubo
Whole-body bipedal huanoid to study locomotion and manipulation.
more »
|
 |
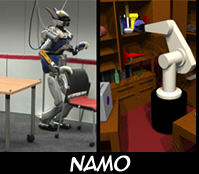
Navigation Among Movable Obstacles (NAMO)
Autonomous robots that move obstacles out of their way. Now including
perception, planning and action.
more »
|
 |
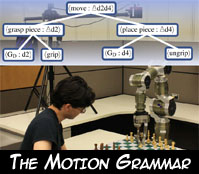
Motion Grammar
Language-based approach to perception and control that provably
guarantees task execution.
more »
|
 |
Ach: Inter-Process Communication
Ach is our efficient channel-based IPC with provable guarantees on
performance.
more »
|
 |
Learning and Planning Task-Level Motion
Optimization strategies for acquiring and achieving table-top
tasks.
more »
|
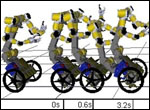 |
Whole-Body Dynamic Motion
Optimization with feedback linearization generates emergent
whole-body navigation behaviors.
more »
|
 |
Whole-Body Manipulation of Environment Objects
Analytical and experimental study of pushing manipulation using
internal forces and mechanical advantage.
more »
|
Other Projects
 |
Paths to Trajectories
Generating optimized trajectories that closely follow kinematic
paths.
more »
|
 |
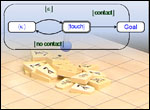
CONAN: Contact Anticipator
Human motion anticipation and response through game-theoretic
multi-step planning.
more »
|
 |
Mixed Palletizing
Optimized Planning with industrial applications to product
distribution.
more »
|
| |
|

|
|
|
|
|
|
|