|
|
|
|

|
July 2009 Humanoids @ Humanoids
Yesterday was a big day for our Humanoids Lab. We had our first submissions to the International Conference on Humanoid Robotics!
I'm especially proud of Misha and JW who stayed up with me until 3AM last night to get these papers in shape. Great work guys! This has been a really productive month with many new things learned and accomplished.
- Congratulations to Misha on his first robotics paper! - I'll let him tell that story and show off his creation. This is a great paper which opens a lot of doors for us to move forward in algorithms for smaller humanoids. I'm grateful to Chris, Carlos, Pushkar and JW for their support and contributions from around the world. In the last minute everyone really pulled together.
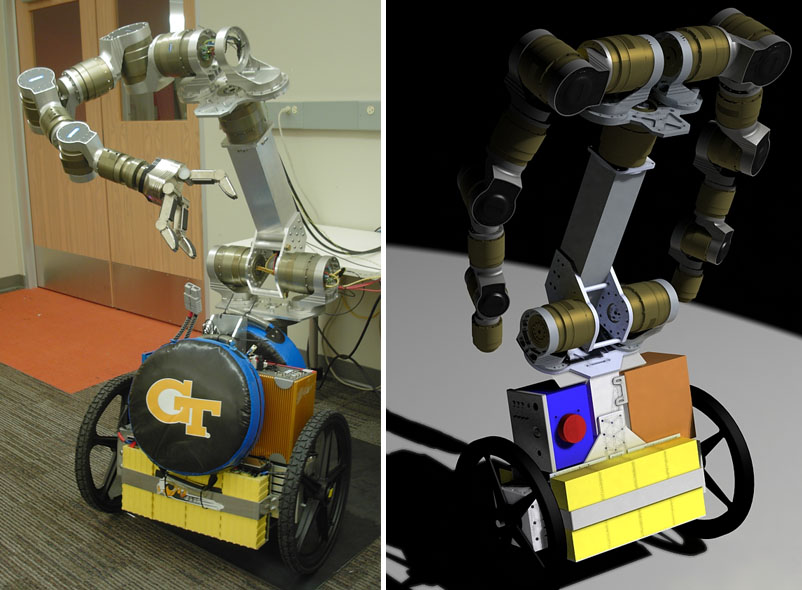
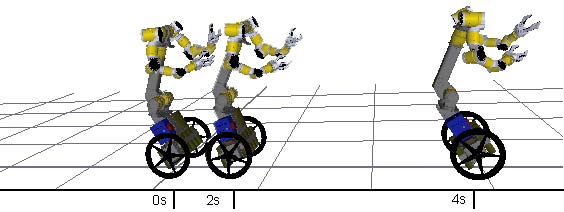
- Golem Krang's first appearance in a publication! - It's true, we wrote a paper about GK and his funky new standing controller. The highlight is that stochastic optimization autonomously produces exciting behaviors for the robot. Check it out here:
M. Stilman J. Wang K. Teeyapan and R. Marceau: Optimized Control Strategies for Wheeled Humanoids and Mobile Manipulators
I am extremely lucky to have worked on a paper with such an incredible group. JW, Kasemsit and Ray really pulled this work together: staying up nights, thinking through controllers and debugging simulations. You guys are amazing and I look forward to continuing our joint efforts in our upcoming secret projects. Thank you:
Jiuguang - Matlab Simulations, Controllers, Optimizations ... there's no end
Kasemsit - Dynamics Derivations, Controllers, Obscure References ...
Ray - SrLib Simulations, Testing, Debugging, Gorgeous pics and moives
Also, I'm grateful to Neil Dantam and Prof. Harvey Lipkin for our discussions on dynamics and controls which helped me finally start to understand our crazy system. Thanks to everyone in BHR for having faith in this concept and building the robot!
Now, some pics and movies:
 |
Optimized Deceleration 1:

Optimized Deceleration 2:
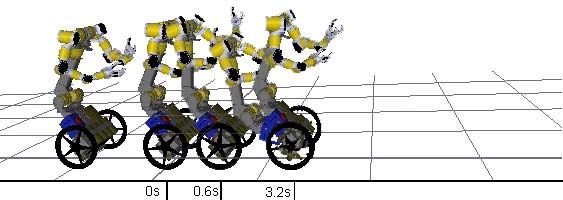
Optimized Acceleration:
|
|

|
|
|
|
|
|
|