It's been a year since the last news update. We've been quite busy
with lots of exciting developments. Here are some of the highlights:
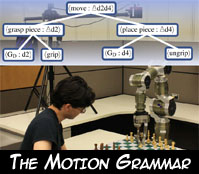
The Motion Grammar was
applied to a number of human-robot domains including the transfer of
knowledge from humans to robots. Neil Dantam, the originator of the
representation has continued its development and expansion both in
theory and practice to results in continuous spaces and broad
applications in robotics. NSF has
sponsored this development with equipment for a Motion Grammar
Laboratory for developing algorithms that transfer knowledge between
Cyber-Physical Systems.
We are starting a new research project on the use of environment
objects as tools by robots. In this project will not only develop new
methods for perception and use of object properties but also
collaborate with Pat Langley at ISLE and Dongkyu Choi at KSU. This
research is now supported by the The
Office of Naval Research
In collaboration with TEMA (Toyota), Tobias Kunz has developed
two new algorithms for the domain of Partner Robots and general robot
control. First, we have extended task-constrained planning to soft
constraints and second we have extended algorithms and created
reliable open source software for time-optimal trajectory following of
paths with limits on joint velocity and acceleration.
Navigation Among
Movable Obstacles (NAMO) was extended to domains with uncertain
information. Martin Levihn and Jon Scholz have developed novel
algorithms for handling exponentially complex configuration spaces and
uncertainty simultaneously during real-time computation.
Golem Krang
now has two arms and two Robotiq hands as well a Kinect for perceiving
the world. We are beginning to look into serious environment
manipulation strategies to be developed and implemented on our
humanoid robot.