|
The Motion Grammar
The Motion Grammar is a powerful new representation for task
decomposition, perception, planning, and hybrid control that provides
a computationally tractable way to control robots in uncertain
environments with guarantees on correctness and completeness. The
grammar represents a policy for the task which is parsed in real-time
based on perceptual input. Branches of the syntax tree form the levels
of a hierarchical decomposition, and the individual robot sensor
readings are given by tokens. We implement this approach in the
interactive games of Yamakuzushi and Chess on a physical robot
resulting in a system that repeatably responds to a strategic and
physically unpredictable human opponent in sustained game-play.
This project is supported by the National Science Foundation.
Software
The Motion
Grammar Kit implements many algorithms for formal language
analysis, verification, and code generation.
Publications
Journal
Neil T. Dantam and Mike Stilman
The Motion Grammar: Analysis of a Linguistic Method for Robot Control
IEEE/RAS Transactions on Robotics.
no. 3. 2013.
We present the Motion Grammar: an approach to represent and verify
robot control policies based on Context-Free Grammars. The
production rules of the grammar represent a top-down task
decomposition of robot behavior. The terminal symbols of this
language represent sensor readings that are parsed in real-time.
Efficient algorithms for context-free parsing guarantee that online
parsing is computationally tractable. We analyze verification
properties and language constraints of this linguistic modeling
approach, show a linguistic basis that unifies several existing
methods, and demonstrate effectiveness through experiments on a
14-DOF manipulator interacting with 32 objects (chess pieces) and an
unpredictable human adversary. We provide many of the algorithms
discussed as Open Source, permissively licensed software.
@article{dantam2013motion,
title = {The Motion Grammar: Analysis of a Linguistic Method for Robot Control},
number = {3},
volume = {29},
pages = {704--718},
journal = {IEEE/RAS Transactions on Robotics},
author = {Neil T. Dantam and Mike Stilman},
year = {2013}
}
Conference
- 2012
Neil T. Dantam, Irfan Essa, and Mike Stilman
Linguistic Transfer of Human Assembly Tasks to Robots
IEEE/RSJ International Conference on Intelligent Robots and Systems.
2012.
We demonstrate the automatic transfer of an assembly task from human
to robot. This work extends efforts showing the utility of linguistic
models in verifiable robot control policies by now performing real
visual analysis of human demonstrations to automatically extract a
policy for the task. This method tokenizes each human demonstration
into a sequence of object connection symbols, then transforms the set
of sequences from all demonstrations into an automaton, which
represents the task-language for assembling a desired object.
Finally, we combine this assembly automaton with a kinematic model of
a robot arm to reproduce the demonstrated task.
@inproceedings{dantam2012mgassem,
title = {Linguistic Transfer of Human Assembly Tasks to Robots},
pages = {237--242},
month = {October},
booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems},
author = {Neil T. Dantam and Irfan Essa and Mike Stilman},
year = {2012}
}
Neil T. Dantam and Mike Stilman
The Motion Grammar Calculus for Context-Free Hybrid Systems
American Control Conference.
2012.
Best Presentation in Session
This paper provides a method for deriving provably correct controllers
for Hybrid Dynamical Systems with Context-Free discrete dynamics,
nonlinear continuous dynamics, and nonlinear state partitioning. The
proposed method models the system using a Context-Free Motion Grammar
and specifies correct performance using a Regular language
representation such as Linear Temporal Logic. The initial model is
progressively rewritten via a calculus of symbolic transformation
rules until it satisfies the desired specification.
@inproceedings{dantam2012mgcalc,
title = {The Motion Grammar Calculus for Context-Free Hybrid Systems},
pages = {5294--5301},
month = {June},
booktitle = {American Control Conference},
author = {Neil T. Dantam and Mike Stilman},
year = {2012}
}
Neil T. Dantam, Carlos Nieto-Granda, Henrik Christensen, and Mike Stilman
Linguistic Composition of Semantic Maps and Hybrid Controllers
International Symposium on Experimental Robotics.
2012.
This work combines semantic maps with hybrid control models,
generating a direct link between action and environment models to
produce a control policy for mobile manipulation in unstructured
environments. First, we generate a semantic map for our environment
and design a base model of robot action. Then, we combine this map
and action model using the Motion Grammar Calculus to produce a
combined robot-environment model. Using this combined model, we apply
supervisory control to produce a policy for the manipulation task. We
demonstrate this approach on a Segway RMP-200 mobile platform.
@inproceedings{dantam2012composition,
title = {Linguistic Composition of Semantic Maps and Hybrid Controllers},
pages = {17--21},
month = {June},
booktitle = {International Symposium on Experimental Robotics},
author = {Neil T. Dantam and Carlos Nieto-Granda and Henrik Christensen and Mike Stilman},
year = {2012}
}
- 2011
Neil T. Dantam, Pushkar Kolhe, and Mike Stilman
The Motion Grammar for Physical Human-Robot Games
IEEE International Conference on Robotics and Automation.
2011.
SAIC/Georgia Tech Achievement Award
We introduce the Motion Grammar, a powerful new representation for
robot decision making, and validate its properties through the
successful implementation of a physical human-robot game. The Motion
Grammar is a formal tool for task decomposition and hybrid control in
the presence of significant online uncertainty. In this paper, we
describe the Motion Grammar, introduce some of the formal guarantees
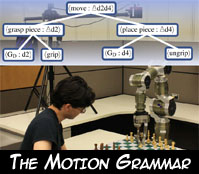
it can provide, and represent the entire game of human-robot chess
through a single formal language. This language includes game-play,
safe handling of human motion, uncertainty in piece positions,
misplaced and collapsed pieces. We demonstrate the simple and
effective language formulation through experiments on a 14-DOF
manipulator interacting with 32 objects (chess pieces) and an
unpredictable human adversary.
@inproceedings{dantam2011chess,
title = {The Motion Grammar for Physical Human-Robot Games},
pages = {5463--5469},
month = {May},
booktitle = {IEEE International Conference on Robotics and Automation},
author = {Neil T. Dantam and Pushkar Kolhe and Mike Stilman},
year = {2011}
}
Neil T. Dantam and Mike Stilman
The Motion Grammar: Linguistic Perception, Planning, and Control
Robotics: Science and Systems.
2011.
We present and analyze the Motion Grammar: a novel unified
representation for task decomposition, perception, planning, and
control that provides both fast online control of robots in uncertain
environments and the ability to guarantee completeness and
correctness. The grammar represents a policy for the task which is
parsed in real-time based on perceptual input. Branches of the syntax
tree form the levels of a hierarchical decomposition, and the
individual robot sensor readings are given by tokens. We implement
this approach in the interactive game of Yamakuzushi on a physical
robot resulting in a system that repeatably competes with a human
opponent in sustained gameplay for the roughly six minute duration of
each match.
@inproceedings{dantam2011yama,
title = {The Motion Grammar: Linguistic Perception, Planning, and Control},
pages = {49--56},
month = {June},
booktitle = {Robotics: Science and Systems},
author = {Neil T. Dantam and Mike Stilman},
year = {2011}
}
Workshop
Arash Rouhani, Neil T. Dantam, and Mike Stilman
Software-Synthesis via LL(*) for Context-Free Robot Programs
4th Workshop on Formal Methods for Robotics and Automation, RSS.
2013.
Producing reliable software for robotic systems requires formal
techniques to ensure correctness. Some popular approaches model the
discrete dynamics and computation of the robot using finite state
automata or linear temporal logic. We can represent more complicated
systems and tasks, and still retain key guarantees on verifiability
and runtime performance, by modeling the system instead with a
context-free grammar. The challenge with a context-free model is the
need for a more advanced software synthesis algorithm. We address
this challenge by adapting the LL(*) parser generation algorithm,
originally developed for program translation, to the domain of online
robot control. We demonstrate this LL(*) parser generation
implementation in the Motion Grammar Kit, permitting synthesis for
robot control software for complex, hierarchical, and recursive tasks.
@inproceedings{rouhani2013software,
title = {Software-Synthesis via LL(*) for Context-Free Robot Programs},
month = {June},
booktitle = {4th Workshop on Formal Methods for Robotics and Automation, RSS},
author = {Rouhani, Arash and Neil T. Dantam and Mike Stilman},
year = {2013}
}
Neil T. Dantam, Magnus Egerstedt, and Mike Stilman
Make Your Robot Talk Correctly: Deriving Models of Hybrid System
RSS Workshop on Grounding Human-Robot Dialog for Spatial Tasks.
2011.
Using both formal language and differential equations to model a
robotic system, we introduce a calculus of transformation rules for
the symbolic derivation of hybrid controllers. With a Context-Free
Motion Grammar, we show how to test reachability between different
regions of state-space and give several symbolic transformations to
modify the set of event strings the system may generate. This
approach lets one modify the language of the hybrid system, providing
a way to change system behavior so that it satisfies linguistic
constraints on correct operation.
@inproceedings{dantam2011talk,
title = {Make Your Robot Talk Correctly: Deriving Models of Hybrid System},
month = {June},
booktitle = {RSS Workshop on Grounding Human-Robot Dialog for Spatial Tasks},
author = {Neil T. Dantam and Magnus Egerstedt and Mike Stilman},
year = {2011}
}
Technical Reports
Neil T. Dantam, Irfan Essa, and Mike Stilman
Algorithms for Linguistic Robot Policy Inference from Demonstration of Assembly Tasks
no. GT-GOLEM-2012-002. Georgia Institute of Technology, Atlanta, GA. 2012.
We describe several algorithms used for the inference of linguistic
robot policies from human demonstration. First, tracking and match
objects using the Hungarian Algorithm. Then, we convert Regular
Expressions to Nondeterministic Finite Automata (NFA) using the
McNaughton-Yamada-Thompson Algorithm. Next, we use Subset
Construction to convert to a Deterministic Finite Automaton. Finally,
we minimize finite automata using either Hopcroft's Algorithm or
Brzozowski's Algorithm.
@techreport{dantam2012algorithms,
title = {Algorithms for Linguistic Robot Policy Inference from Demonstration of Assembly Tasks},
number = {GT-GOLEM-2012-002},
institution = {Georgia Institute of Technology, Atlanta, GA},
author = {Neil T. Dantam and Irfan Essa and Mike Stilman},
year = {2012}
}
Neil T. Dantam and Mike Stilman
The Motion Grammar: Linguistic Perception, Planning, and Control
no. GT-GOLEM-2010-001. Georgia Institute of Technology, Atlanta, GA. 2010.
We present the Motion Grammar: a novel unified representation for task
decomposition, perception, planning, and hybrid control that provides
a computationally tractable way to control robots in uncertain
environments with guarantees on completeness and correctness. The
grammar represents a policy for the task which is parsed in real-time
based on perceptual input. Branches of the syntax tree form the levels
of a hierarchical decomposition, and the individual robot sensor
readings are given by tokens. We implement this approach in the
interactive game of Yamakuzushi on a physical robot resulting in a
system that repeatably competes with a human opponent in sustained
game-play for matches up to six minutes.
@techreport{dantam2010mgtech,
title = {The Motion Grammar: Linguistic Perception, Planning, and Control},
number = {GT-GOLEM-2010-001},
institution = {Georgia Institute of Technology, Atlanta, GA},
author = {Neil T. Dantam and Mike Stilman},
year = {2010}
}
Project Members
|

|